Before we even started making these programs, we had problems with the wire that hooked up the LogoChip with the computer. The PicoChip program kept indicating that the there was a "Communication Problem". In order to find the exact problem, we had to do a little of debugging and we were able to find that a wire was not properly connected to its pin. Therefore, we had to re-sauter the wires unto new pins.
After fixing that problem, we were able to make our programs. This a picture of our programs that control each side of the motor. There are forwards and backwards blocks that control the right and left side of the motor.
 We then combined these blocks to make the robot move forward, backwards, stop, coast and to spin on either side. This is a picture of these programs that produce these motions:
We then combined these blocks to make the robot move forward, backwards, stop, coast and to spin on either side. This is a picture of these programs that produce these motions: We then made two programs that would make the motor break left and right. In order to do this, we had to set a motor to a lower power, so that the robot would drift towards the side where the motor is fastest. This is a picture of these programs:
We then made two programs that would make the motor break left and right. In order to do this, we had to set a motor to a lower power, so that the robot would drift towards the side where the motor is fastest. This is a picture of these programs: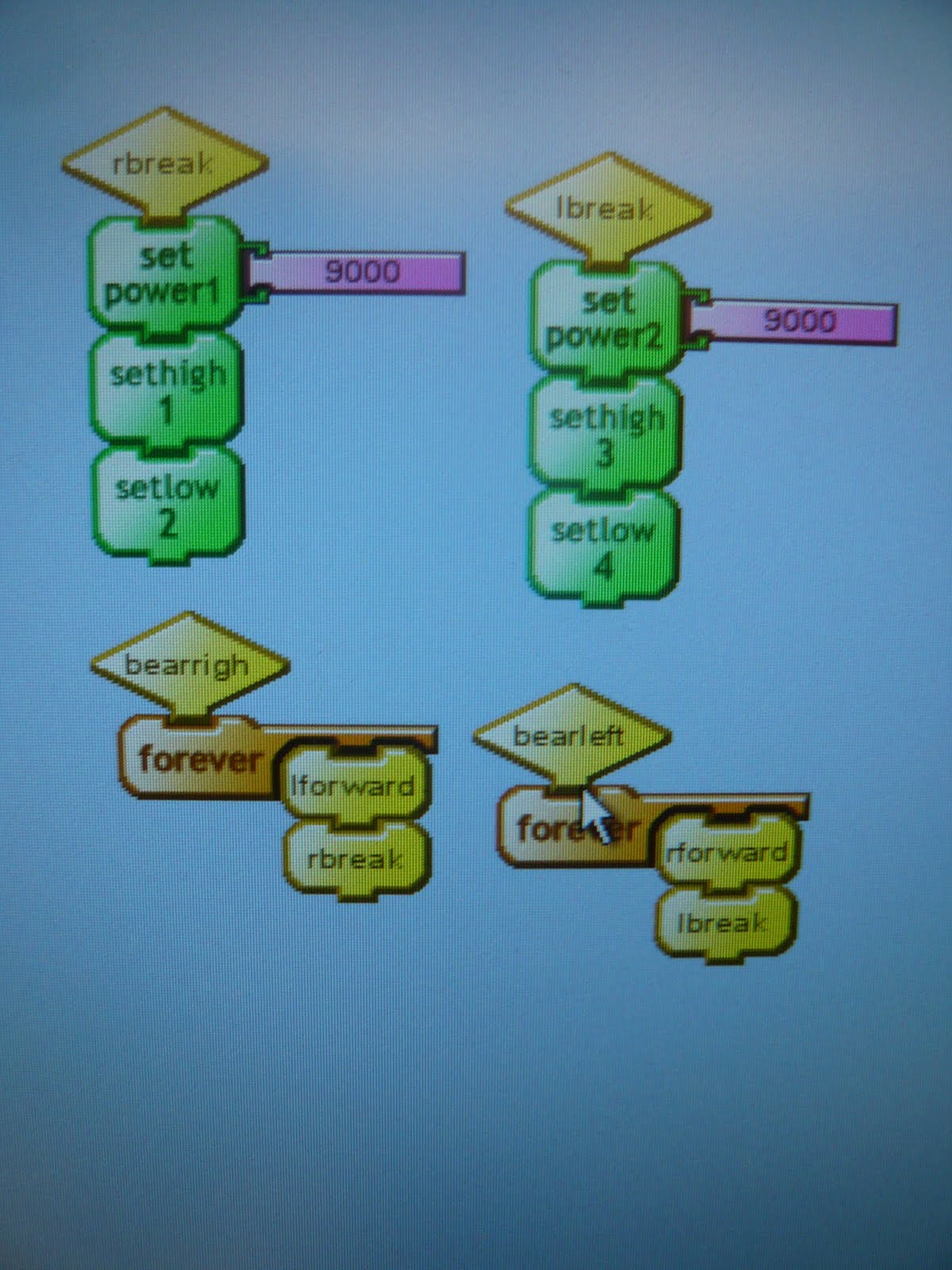
No comments:
Post a Comment